Robotics Safety
Robots are programmable, multi-functional, mechanical manipulators powered by electromechanical, hydraulic, or pneumatic systems. On campus, robots are primarily used for research and educational purposes, but they can also be part of industrial-scale experiments. This page provides guidance for Principal Investigators (PIs) and researchers to reduce hazards associated with robotic systems through engineering controls, administrative measures, and safe work practices.
Hazards
Robotic systems present a variety of hazards, particularly during non-routine operations such as programming, maintenance, testing, and setup. These activities often require personnel to be within the robot’s working area, increasing the risk of injury.
Common hazards include physical impact from moving parts, crushing or trapping between components, and failures of mechanical systems. Electrical hazards may arise from exposed wiring or faulty connections, while additional risks may be associated with pressurized systems, flying debris, or environmental interference.
Other hazards include tripping over cables, exposure to electromagnetic interference, and fire risks related to electrical overloads or flammable materials.
Hazards can originate from human error, control system malfunctions, unauthorized access, improper installation, or failure of mechanical or electrical components. A thorough hazard assessment is essential to identify and mitigate these risks.
Key components
Robotic systems used in laboratories and research environments are advanced mechanical systems designed to perform a wide range of automated tasks. These systems operate using different power sources, including electrical, hydraulic, and pneumatic energy, and are capable of executing precise, repetitive, and programmable movements.
A typical robotic system consists of one or more articulated arms made up of interconnected links and joints. These joints are powered and controlled to allow movement across multiple axes. The arm supports a wrist mechanism, which in turn holds an end-effector. End-effectors are task-specific tools such as grippers, cutters, welding heads, or other custom devices designed for research applications.
A complete robotic system includes not only the robot itself but also associated components such as sensors, control systems, safety devices, and auxiliary equipment. All these elements must function together safely and reliably to perform intended tasks.
Manipulator Safety
Special attention must be given to the operator, or personnel working in close proximity to robotic systems, particularly during programming or troubleshooting activities. When a robot is in teach mode, the operator has direct control over its movement and must be fully aware of system behavior and limitations.
Errors in programming or system setup can result in unexpected or hazardous movements. To mitigate these risks, robot speed must be limited during teaching operations, and only trained personnel should be permitted within restricted areas.
During normal automatic operation, all safety guards and protective devices must be active. Personnel should never enter the robot’s safeguarded area while it is operating. If entry is required for inspection or adjustment, the system must be placed in a controlled mode with reduced speed and full operator control.
Maintenance activities must also be conducted under controlled conditions, with the robot placed in manual or teach mode and appropriate safeguards in place.
Installation, Maintenance, and Programming
Proper installation and setup are critical to ensuring safe operation. Robotic systems must be installed according to manufacturer recommendations and relevant safety codes. The surrounding environment must be evaluated to ensure compatibility with the robot's operational requirements, including temperature, humidity, ventilation, and available space.
Power supplies must meet specified voltage, grounding, and load requirements. Robots must be securely mounted or anchored to prevent unintended movement, vibration, or tipping. Care must be taken during design and installation to avoid introducing hazards such as pinch points, collision zones, or exposed energized parts.
Clearly defined operating zones must be established and visibly marked using floor tape, barriers, or signage. Mechanical limits or stops must be incorporated to restrict robot motion within safe boundaries, especially under maximum speed and load conditions.
A formal Lockout/Tagout (LOTO) procedure must be implemented for all maintenance and servicing activities. Preventative maintenance schedules must be followed to ensure continued safe operation, including regular inspections of safety-critical components, such as emergency stops, sensors, and wiring.
During programming or teaching operations, only authorized and trained personnel must be allowed inside the robot's work envelope. Additionally, robot motion during teach mode must be restricted to low speeds to reduce the risk of injury.
Control Devices
Control systems are a critical component of robotic safety. The main control interface should be positioned outside the robot’s hazardous operating area while still allowing clear visibility of the system.
Emergency stop devices must be strategically located, easily accessible, and clearly identifiable. These devices must override all other system functions and immediately halt robot motion in case of an emergency. Portable control devices, such as teach pendants, must also include emergency stop functionality.
Control systems should be designed to automatically stop the robot if abnormal conditions occur, such as excessive speed, unexpected movement, or operation beyond defined limits. All controls must be clearly labeled and designed to minimize the risk of accidental activation.
Each robotic system should be equipped with a dedicated disconnecting means, such as a circuit breaker, that can be locked in the “off” position during maintenance. The system design must prevent automatic restart after power interruptions and ensure safe behavior in the event of failures in electrical, hydraulic, or pneumatic systems.
Where possible, systems should allow manual movement of robot axes without applying power, enabling safe positioning during maintenance or setup. All electrical components must comply with applicable safety standards for grounding, wiring, and hazardous locations.
Hazard Controls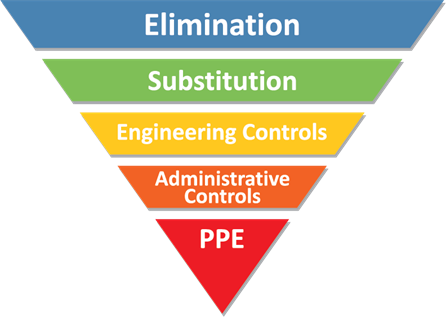
An effective robotic safety program relies on multiple layers of protection, structured according to the hierarchy of controls. To reduce risks to acceptable levels, engineering controls, administrative measures, and safe work practices must be integrated into the design and operation of robotic systems.
Elimination
Whenever possible, eliminate hazards by removing the need for direct human contact with moving robotic parts. Tasks such as repetitive material handling, sample transfer, or positioning can be fully automated so personnel do not need to enter the robot work zone during operation. Hazardous pinch points or sharp end-effectors should be removed at the design stage.
Substitution
Replace rigid metal grippers or sharp tooling with soft grippers made from flexible materials such as silicone, rubber, or compliant polymers. Soft grippers reduce crushing, pinching, and impact injuries during accidental contact. They are especially suitable for collaborative robots handling delicate objects in research and teaching labs.
Engineering Controls
Engineering controls physically reduce exposure to hazards through safer system design. Engineering controls can include force/torque sensors, speed-limiting functions, emergency stop devices, interlocks, guarded work zones, and presence-sensing devices such as light curtains or scanners.
Guarding Methods
Physical barriers are the primary engineering control for preventing personnel access to hazardous areas. Interlocked barrier guards automatically stop robot motion when a gate is opened, ensuring that operators cannot access moving components during operation. Fixed barrier guards provide a permanent obstruction that requires tools for removal and prevent inadvertent entry into the work envelope. In low-risk situations, awareness barriers such as chains, railings, or painted perimeters may be used to visually or physically define boundaries, alerting personnel without providing physical restraint.
Presence-Sensing Devices
Presence-sensing systems, including pressure-sensitive mats, light curtains, or advanced ultrasonic, RF, and laser sensors, detect when personnel enter protected zones and automatically halt robot motion. These devices must be designed to fail safely, ensuring that any malfunction will not compromise personnel safety.
Emergency Braking
Robots should incorporate dynamic braking systems capable of safely stopping motion without introducing additional hazards. This prevents sudden drops of robot arms or ejection of work pieces during emergency stops or power loss.
Administrative Controls
Administrative controls reduce risk through policies, procedures, and training. Personnel should receive training on safe robot operation, robot motion awareness, emergency shutdown procedures, and hazards associated with end-effectors. Standard Operating Procedures (SOPs), maintenance schedules, authorized-user lists, warning signage, and routine risk assessments should be implemented for all robotic activities.
Training
Effective training is essential for preventing accidents and ensuring the safe operation of robotic systems. All personnel involved in operating, programming, maintaining, or working near robots must receive role-specific training. The Principal Investigator (PI) is typically responsible for ensuring users are properly trained.
Training programs may include:
- Hazard identification and risk awareness.
- Safe operating procedures and control system use.
- Emergency response and shutdown procedures.
- Lockout/Tagout (LOTO) and energy isolation.
- Electrical and maintenance safety.
- Safe operation during teach/manual modes.
- Identification of pinch points and restricted areas.
- Task-specific hazards and required control measures.
- Refresher training and documentation of authorized users.
Risk Assessment
Risk assessments must identify task/hazard pairs, determine risk levels, and specify appropriate mitigation strategies. These assessments are the foundation for both procedural and engineering controls. Each robot system presents unique hazards that must be identified and mitigated. Integrators perform design-stage risk assessments to define safety measures and identify operator tasks. Users provide environmental context and personnel information, maintaining the documentation over time.
Standard Operating Procedures (SOPs)
SOPs translate risk assessments into clear, actionable steps for personnel. Effective SOPs should:
- Reference updated risk assessments and risk mitigation measures.
- Analyze tasks from the operator’s perspective.
- Provide step-by-step instructions (≤9 steps per procedure).
- Detail required engineering controls, awareness devices, and PPE.
- Outline correct sequencing when multiple control devices are used.
- Reference manufacturer or integrator procedures as applicable.
- Specify verification or sign-off requirements.
- Define access methods for personnel at the worksite.
- Include periodic review and update frequency to maintain relevance.
Signage and Warning Systems
Audible alarms and visual indicators serve as supplementary controls to enhance situational awareness but should never be relied upon as the primary safeguard. They are intended to support, rather than replace, physical barriers or presence-sensing devices.
Personal Protective Equipment (PPE)
Use PPE when other controls do not fully eliminate risks. PPE can include safety glasses, gloves, protective clothing, and insulated footwear. Personnel must be trained in correct use, maintenance, and limitations of their PPE
Additional Resources
Robot Manipulator Safety Rules - Illinois Robotics Group
Robotics Safety - Virginia Tech
Robotic Safety - University of Texas at Austin
Industrial Robot Systems and Industrial Robot System Safety - OSHA
Robotics in the Workplace - Patty's Industrial Hygiene